
[may 25] spectral entropy in dln
Spectral Entropy Dynamics in Deep Linear Networks
Intuition
Can we track overparametrized linear network learning only with a single scalar ?
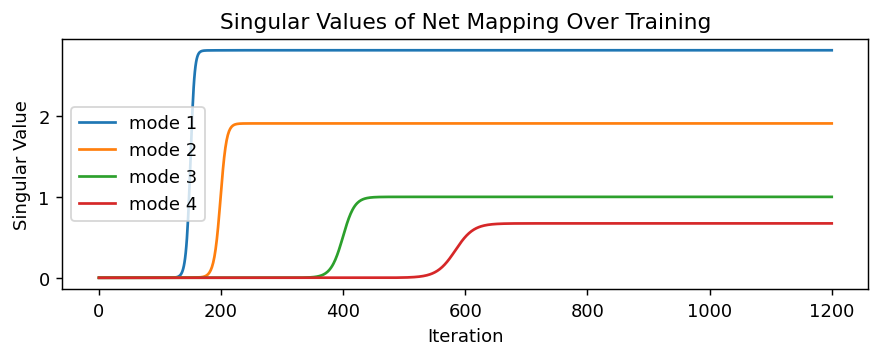
Saxe tell us that in a DLN, learning is sequential and hierarchical : from important low frequeny signal to high frequency signal. He also give us :
\[a_{\alpha}(t)=\frac{s_{\alpha}e^{2_{\alpha}t/{\tau}}}{e^{2s_{\alpha}t/{\tau}} - 1 + s_{\alpha}/a_{\alpha}^0}\]It allowed to derive:
- which mode is learning first
- when the network start to learn the noise
- if this sequential and hierarchical properties allow us to approximate an optimal stopping point for learning ?
So the main tool will be spectral entropy: \(H(t) = - \sum_\alpha p_\alpha \log p_\alpha\)
with :
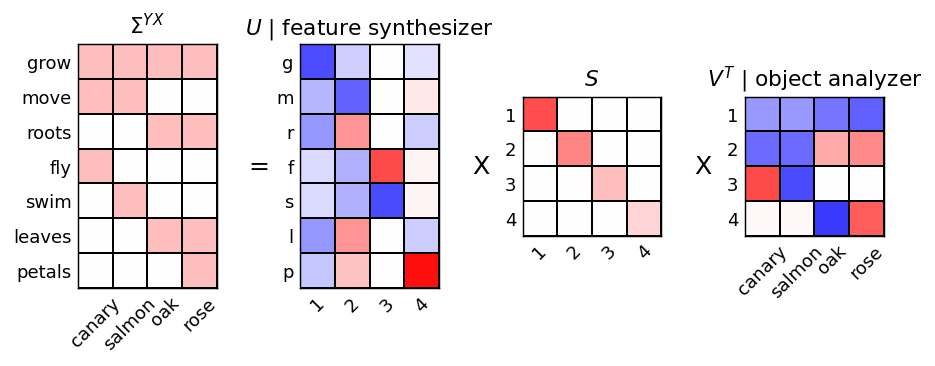
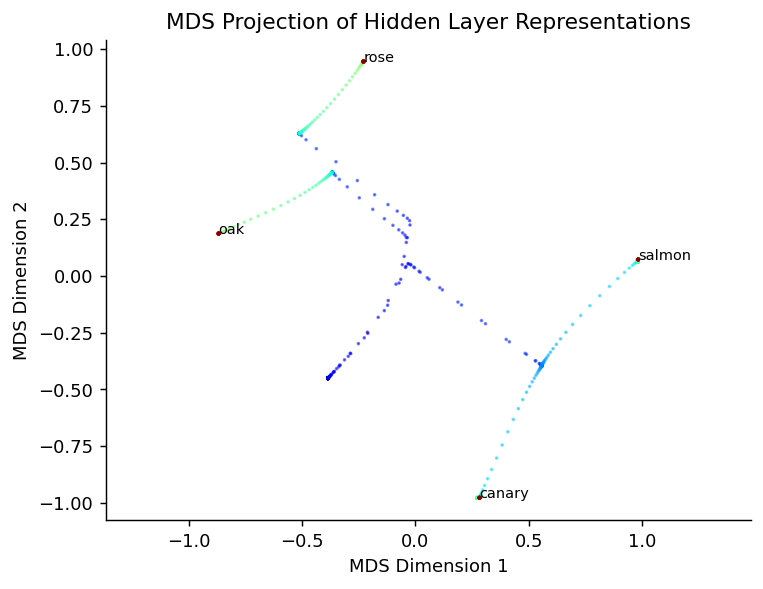
\[p_\alpha = \frac{a_\alpha^2}{\sum_\beta a_\beta^2}\]We start with the same setup as saxe leading to this covariance, mds projection, spectral dynamics and entropy:
And by plotting the entropy we end up with this:
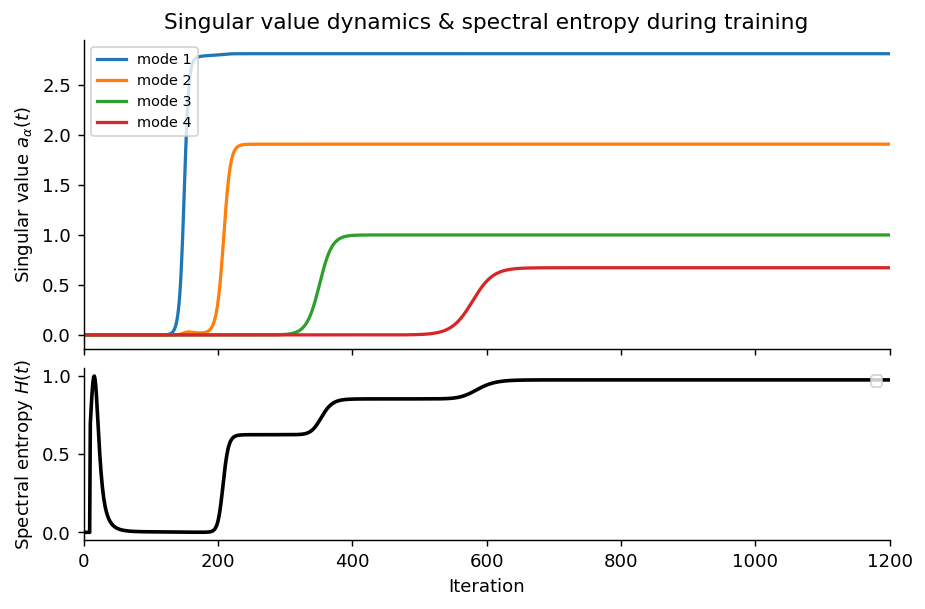
As we know:
- low entropy means that only a few modes dominates
- high entropy : energie is spread accros the modes
Some intuitions:
- If signal to noise ratio is higher, or \(dim -> \infty\), maybe ye’ll loose the “cascade” effect of the entropy ?
Résultat principal : covariance identity
En dérivant :
\[\begin{align} H(t) = -\sum_{\alpha}p_{\alpha}(t)log(p_{\alpha}(t)) \end{align}\]so
\[\begin{align} \dot{H}(t) &= \sum_{\alpha} d/{dt} (p_{\alpha}log(p_{\alpha}))\\ d/{dt}(p.log(p)) &= \dot{p}log(p) + p\dot{p}/p \\ &= \dot{p}(log(p) + 1)\\ \dot{H} &= \sum_{\alpha} \dot{p_{\alpha}}(log(p_{\alpha}) + 1)\\ &= \sum_{\alpha} \dot{p_{\alpha}}log(p_{\alpha}) \text{ because } \sum_{\alpha} p_{\alpha} = 1. \end{align}\]Computing \(\dot{p}_{\alpha}\)
\[p_{\alpha} = \frac{a_{\alpha}^2}{S}, S = \sum_{\beta}a_{\beta}^2\] \[\begin{align} \dot{p}_{\alpha} &= \frac{2a_{\alpha}\dot{a_{alpha}}S - a^2_{\alpha}\dot{S}}{S^2} \\ &= \frac{2a_{\alpha}\dot{a_{\alpha}}S - 2a^2_{\alpha}\sum_{\beta}a_{\beta}\dot{a}_{\beta}}{S^2} \\ &=\frac{2a^2_{\alpha}}{S}(\frac{\dot{a}_{\alpha}}{a_\alpha} - \frac{\sum_{\beta}a_{\beta}\dot{a}_{\beta}}{S}) \\ \sum_{\beta}\frac{a^2_{\beta}}{S}\frac{\dot{a}_{\beta}}{a_{\beta}} = \sum_{\beta}p_{\beta}g_{\beta} \\ &=2p_{\alpha}(g_{\alpha} - E_p[g])\\ \dot{H}(t)&=-\sum_{\alpha}2p_{\alpha}(g_{\alpha} - E_p[g])log(p_{\alpha})\\ &=-2\sum p_{\alpha}g_{\alpha}log(p_{\alpha}) + 2E_p[g]\sum p_{\alpha} log(p_{\alpha})\\ &=-2(E_p[g.log(p)] - E_p[g]E_p[log(p)])\\ &=-2Cov(g_{\alpha}, log(p_{\alpha})) \end{align}\]then \(g_{\alpha} = \frac{\dot{a}_{\alpha}}{a_{\alpha}}\) is the relative rate of change. And \(log(p)\) is nice because it emphasize which mode is small and which one is huge, so \(Cov(g_{\alpha}, log(p_{\alpha}))\) tells us if faster learned modes are small or big: we know the answer from Saxe, but good to know the insight of \(H\).
Cette formule explique les trois phases d’apprentissage.
Au début :
- les modes importants grandissent vite,
- les petits modes sont encore absents.
Donc :
- gros \(g_\alpha\),
- petits \(p_\alpha\).
Cela réduit l’entropie :
\[\dot H < 0\]Le réseau concentre son énergie sur quelques directions dominantes.
2. Phase de généralisation
À un certain moment :
- les grands modes ont saturé,
- les petits modes n’ont pas encore démarré.
Le système atteint un équilibre :
\[\dot H \approx 0\]Le réseau représente correctement la structure principale des données.
3. Mémorisation
Ensuite :
- les modes bruit commencent à croître,
- ils ont encore une faible énergie,
- mais leur taux de croissance est grand.
Cela redistribue l’énergie sur beaucoup de directions :
\[\dot H > 0\]Le réseau commence à apprendre des détails fins et du bruit.
Fenêtre de stopping
On définit :
-
\(t^*\) : minimum de l’entropie,
-
\(t^{**}\) : début de la phase de mémorisation.
Le résultat important :
\[t^* \le t_{\mathrm{opt}} \le t^{**}\]où :
\[t_{\mathrm{opt}}\]est le meilleur temps d’arrêt pour la généralisation.
Intuition
Avant \(t^*\) :
- les modes importants ne sont pas encore appris.
Après \(t^{**}\) :
- le bruit commence à être appris.
Donc la meilleure généralisation doit se situer entre les deux.
Cela donne une version dynamique du early stopping :
arrêter avant que les modes bruit deviennent dominants.